youBot-py (Under Development)¶
- The first stable release 0.1.0 was made available on 19.01.2014
- The next stable release 0.2.0 will be made available on 30.01.2014
For the changes happening, refer to ChangeLog
This wrapper is intended as python library for youbot :
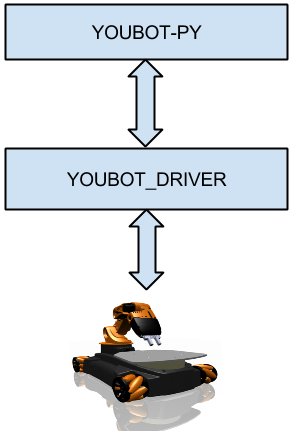
- The youbot-py is a pure python wrapper for youbot.
- Developing a python wrapper for youBot with out any dependency of framework was the aim of this wrapper.
- In order to request new features, please raise ticket to hotline@youbot-store.com.
- For help in installation and reporting issues, add a issue in git hub https://github.com/praman2s/youbot-py/issues
Major Releases¶
The major releases does not include or plan for bug fixes. The bug fix release will happen as soon as a bug is found
| Month-year | Release | Functions |
|---|---|---|
| Jan19-2014 | V0.1 | Support for Arm |
| Jan30-2014 | V0.2 | Support for Base |
| Feb15-2014 | V0.3 | Whole Body Support (FSM support) |
| Feb28-2014 | V1.0 | Final Release with maintanence |
Installation¶
Please follow the below installation instructions:
Building and Installing the wrapper:
Build and Install.
- git clone https://github.com/praman2s/youbot-py.git
- cd youbot-py
- sh configure.sh
- python setup.py build –build-base=.
- sudo bash
- python setup.py install
Now the wrapper is ready to be tested.
Manual¶
The whole wrapper is divided into three parts:
- Communication with youbot.
- Getters and Setters for youbot arm.
- Getters and setters for youbot base.
Communication with youbot¶
This sets up the communication between PC and youBot ethercat drivers:
from youbotpy import * # Imports all the modules that are being exposed
robot = robot() # Tries to establish connection, if not throws exception
robot.Calibrate() # Optional. For some users who want candle positon as initial pose.
Getters and Setters for youbot arm (Available)¶
The wrapper allows you to work with arm alone. Config files have to altered accordingly:
arm = arm() # Get the first arm connected.
arm.GetJointValues() # Returns the current joint value as 5x1 array.
arm.SetJointValues(value) # Sets joint values. value should be 5x1 array.
arm.GetVelocityValues() # Returns the current joint velocity as 5x1 array.
arm.SetVelocityValues(value) # Sets joint velocity values. value should be 5x1 array.
arm.GetTorqueValues() # Returns the current joint torque values as 5x1 array.
arm.SetTorqueValues(value) # Sets joint toruque values. value should be 5x1 array.
Getters and Setters for youbot base (for 0.2.0)¶
The wrapper allows you to work with base alone. Config files have to altered accordingly:
base = robot.GetBase() # Tries to check if the base is connected.
base.SetVelocity([x,y,theta]) # Sets the base velocity to x,y and theta.
base.GetVelocity() # Returns a 3x1 (x,y,\theta) velocity vector.
base.GetPose() # Returns the pose info based on odometry.
Examples¶
This is an example file where it takes three lines to get connected to youBot:
from youbotpy import * #exposes youbot_driver to python
import time
robot = arm() # Calls the constructor . Important to call at the begining
#robot.Calibrate() # Sets the robot in candle position and sets encoder to zero
joint_values = [1,1,-1,1,1] # some position that of the arm that the user demands
robot.SetArmJointValues(joint_values) # sets the joint values
time.sleep(2)
print "End of Hello World..!!!"
